The opposite phase encoded echo planar images (EPI) are registered to each other.
We use one model for the forward and backward transformation, which estimates a shift map/voxel displacement map, so the forward and backward transformations are exactly each others inverse.
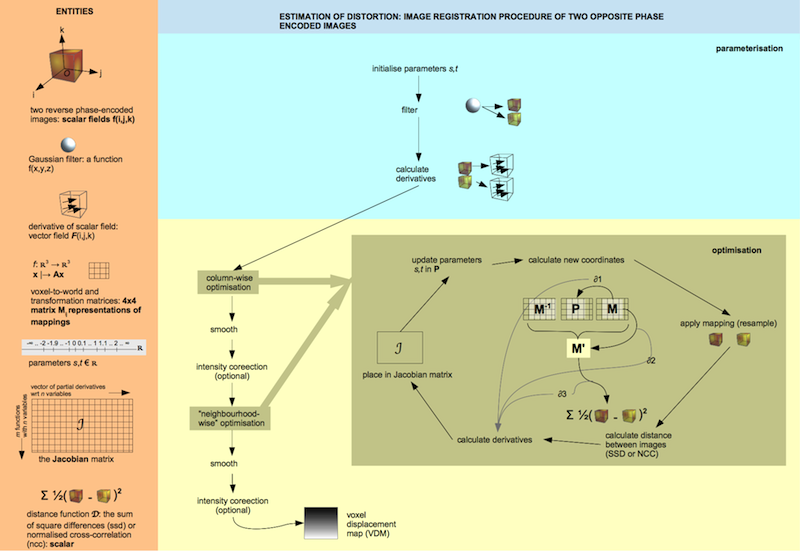
In the “simple” approach, the optimal transformations (scaling and translation) in the y-direction are estimated column-wise; for each iteration, the distance between the images is established via sum of square differences (SSD) or normalised cross-correlation (NCC). Via the successive approach, a local search is performed to find the most plausible deformation (measured via NCC or SSD); also, smoothing and intensity correction is applied during the process. The voxel displacement map is then applied using cubic spline interpolation.
The local search is inspired by Heinrich et al [1]. The algorithm in general is based on Andersson et al [2] and Ruthotto et al [3].
Image registration starts with an objective/cost function. This function specifies what needs to be minimised. This is usually the distance between the template image and the transformed reference image, so that the images are as similar as possible. The aim of the image registration process is to find the optimal geometric transformation between the images (see [4]). This geometric transformation can consist of displacements ("translation"), rotations, scaling and shear.
To find the optimal transformation, initial parameters and a distance measure are chosen. Then the optimisation process starts (see figure below).
Each optimisation cycle is as follows. First the new coordinates are calculated. Then the image is resampled/interpolated to obtain the new intensity values. Then the distance between the transformed images is calculated. The distance between the images needs to be minimal, hence the derivative needs to be zero. The parameters are changed until the minimum has been found. For more information about image registration in general, see for example Modersitzki [4].
There are intensity-based and entropy-based distance measures. The intensity-based ones might be more appropriate for intra-modal distance and the entropy-based measures for inter-modal image distances. An example of an intensity-based measure is sum of square differences (SSD). The normalised cross-correlation (NCC) depends less on intensities and could also be used for inter-modal registration. An example of an entropy-based measure is normalised mutual information (NMI).
Regularisation is used to prevent too sudden changes in the transformations. It usually involves some form of smoothing. If regularisation is used, this can be added as an extra term in the cost function:
new distance between images = "matching term" + "regularisation term"
= distance between template image and transformed reference image + some form of smoothing.
COPE v0.5 uses iterative optimization with reduced smoothing of the VDM and smaller local search range at each step. This method regularizes by preventing high local deviations in the deformation field while still allowing for relatively large deformations.
[1]Heinrich, M.P., Papie, B.W., Schnabel, J.A., and Handels, H. (2014) Non-parametric Discrete Registration with Convex Optimisation. In S. Ourselin and M. Modat (Eds.): WBIR 2014, LNCS 8545, pp. 51-61.
Latest update of this page: 05 March 2015
[2] Andersson, J.L.R. and Skare, S. (2001) A Model-Based Method for Retrospective Correction of Geometric Distortions in Diffusion-Weighted EPI. NeuroImage 16, 177-199.
[3] Ruthotto, L, Mohammadi, S, Heck, C, Modersitzki, J, and Weiskopf, N. (2013) HySCO - Hyperelastic Susceptibility Artifact Correction of DTI in SPM. Presented at the Bildverarbeitung fuer die Medizin 2013.
[4] Modersitzki, J. (2004) Numerical Methods for Image Registration. Oxford, UK: Oxford University Press.